Publications
*: supervised students
2024
-
 Distributed Perception Aware Safe Leader Follower System via Control Barrier Methods under review 2024
Distributed Perception Aware Safe Leader Follower System via Control Barrier Methods under review 2024 - Disturbance Observer-based Control Barrier Functions with Residual Model Learning for Safe Reinforcement Learning under review 2024
-
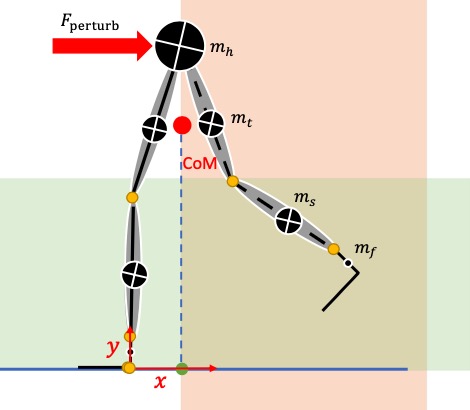 Safety Augmentation for Volitional Human Locomotion via Lower-Limb Exoskeletons: A Case Study on Balance Control IEEE Control Systems Letters (L-CSS) 2024
Safety Augmentation for Volitional Human Locomotion via Lower-Limb Exoskeletons: A Case Study on Balance Control IEEE Control Systems Letters (L-CSS) 2024 -
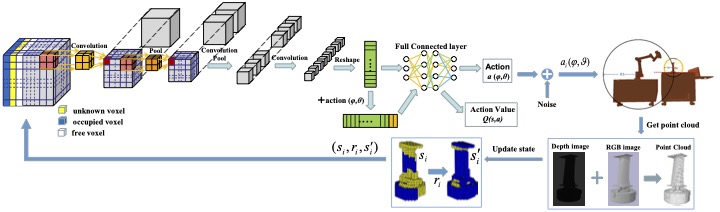 Viewpoints Planning for Active 3-D Reconstruction of Profiled Blades based on DDPG under review 2024 [abstract]
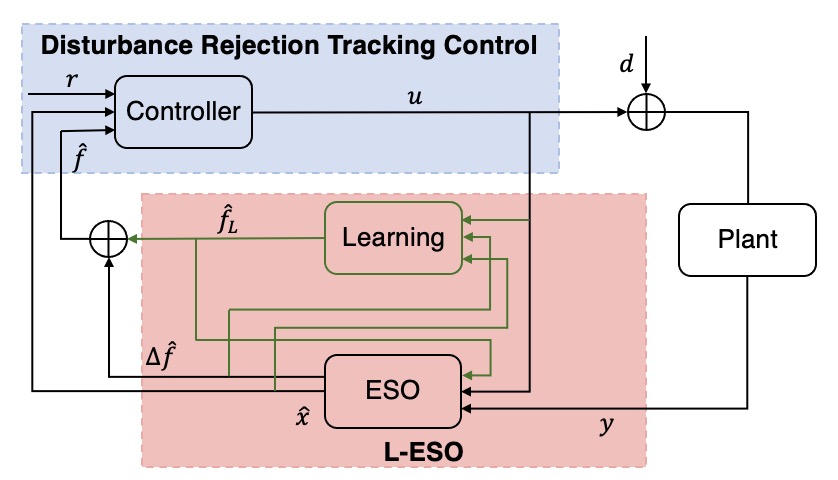
Viewpoints Planning for Active 3-D Reconstruction of Profiled Blades based on DDPG under review 2024 [abstract] - Quadrotor Fault-Tolerant Control at High Speed: A Model-Based Extended State Observer for Mismatched Disturbance Rejection Approach under review 2024
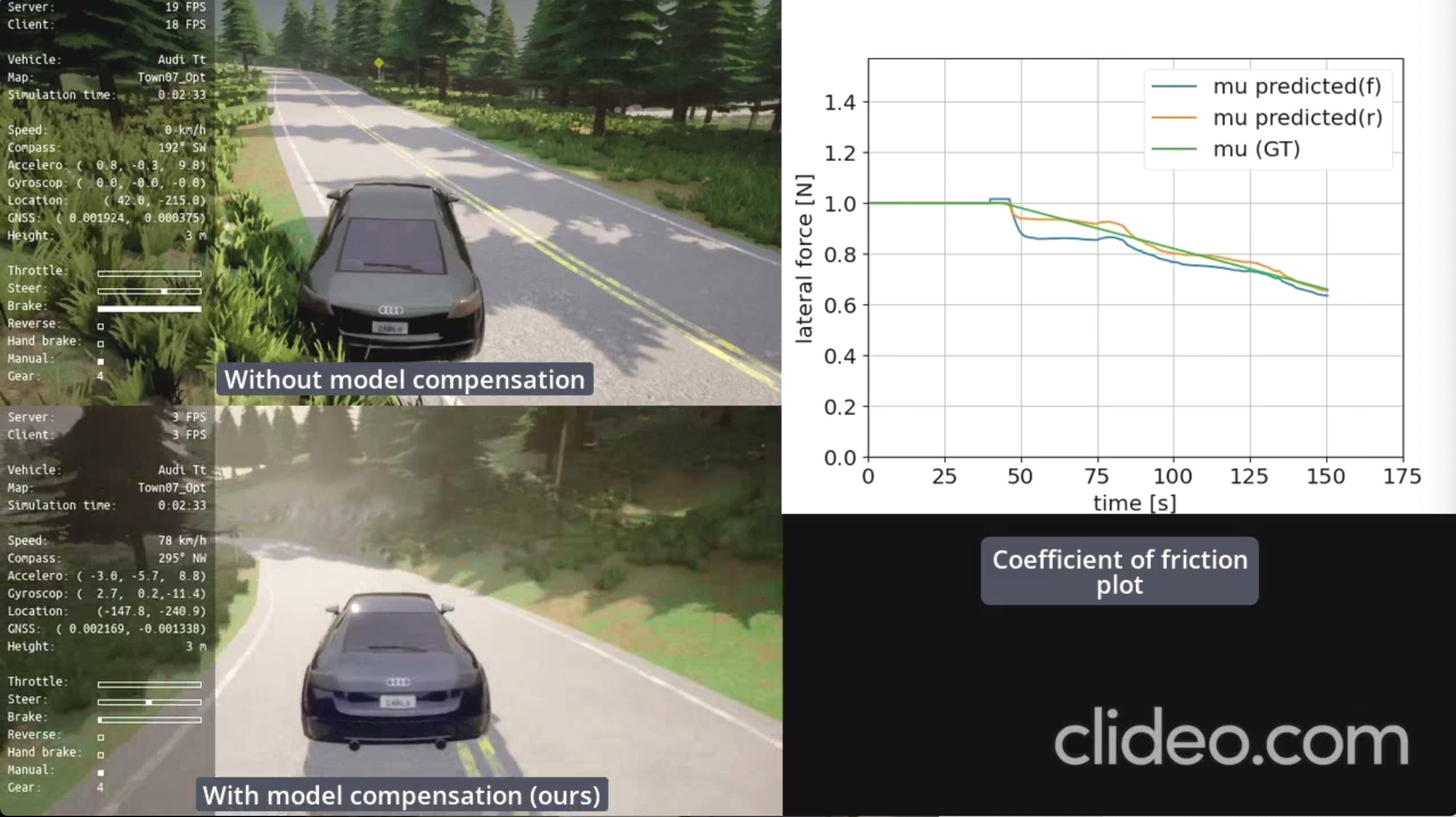
- Add-on Safe Disturbance Compensation for High-Performance Control of Robotic Systems with Closed Architecture under preparation 2024
2023
-
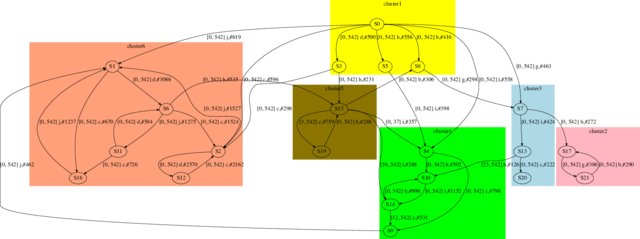
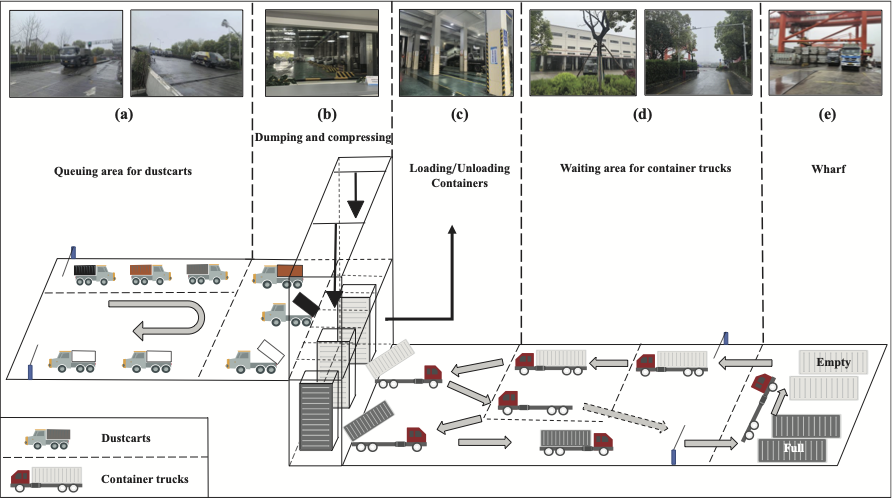 Queue Modeling and Simulation for a Large-scale Municipal Domestic Waste Transfer Station under review 2023 [abstract]
Queue Modeling and Simulation for a Large-scale Municipal Domestic Waste Transfer Station under review 2023 [abstract]